


轉載從: Tech News 科技新報
在不久以前,有科學家發現蟑螂在高速運動時,每次只有三隻腳著地,一邊兩隻,另一邊一隻,如此循環反覆。根據這個原理,仿生學家製造出機器蟑螂,它不僅每秒能前進 3 公尺,且平衡性非常好,能適應各種惡劣環境。

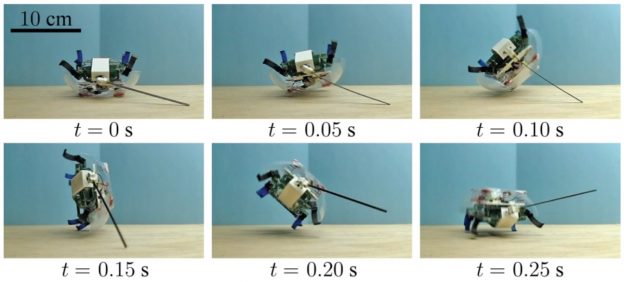
尾巴是蟑螂機器人翻轉的關鍵
近日,據了解,由羅恩·福瑞斯(Ron Fearing)引領的加州大學柏克萊分校的生物模擬系統實驗室,擁有研究各種不同類型蟑螂機器人的豐富經驗。然而,他們最新的 roachbot 與原始昆蟲有顯著的脫離:因為 roachbot 有一條尾巴,實際的蟑螂沒有,尾巴的增設意味它可以輕鬆翻轉。

對動態機器人來說,大多數尾巴都是比較笨重的裝置,並有一定的重量,因為它們的功能依賴足夠的慣性來影響機器人的身體。而這款蟑螂機器人的尾巴,基本上是一根堅硬的碳纖維棒,它會旋轉並推地面,讓機器人翻過來。
科研人員發現,把尾巴和貝殼結合在一起,就能創造出一個非常有彈性的小腿機器人。
蟑螂機器人可輕鬆地從樓梯上跳下來,隨後降落在地板上。它能夠在眨眼的時間(大約是 0.25 秒)自主恢復和控制,然後重新再次跳躍。獲悉,這種矯正技術有可靠性,因為測試顯示,機器人可在木頭、瓷磚和地毯上進行一次性翻轉。如果在不太平滑的岩石(固定和鬆散的)上翻轉,則成功率下降到 80%,但是由於機器人可用最少的時間和精力嘗試糾正,80% 的速度夠可靠。
蟑螂機器人下一步做什麼?
因為尾巴對很多其他東西都有好處,所以研發這個機器人的下一步就是看它還能做什麼,研究人員說,「透過將尾巴的控製做為額外的運動肢體,進一步拓展機器人的機動性,探索利用單一自由度的低品質尾巴來實現潛力。由於尾巴可長時間使用較大的力量,這相對於腿的承受力而言,所以有衝擊力的尾巴運動可產生明顯的垂直跳躍,以清除障礙或快速轉彎。」
除此之外,《紐約時報》曾經記載關於真實的蟑螂機器人平日翻轉的細節。
在一般情況下,一隻蟑螂可能會發現自己在光滑的地板、光滑的木頭、瓷磚或石頭。由於有相對較高的重心和光滑圓潤的背部,一隻被翻過來的蟑螂會發現很難在沒有樹枝、樹葉或其他不平整特徵的情況下,利用腿去翻轉身體。
Carlos s . Casarez、Ronald s . Casarez,這兩位來自加州大學柏克萊分校(University of California,Berkeley)的科研人員,在 2017 年加拿大溫哥華的 IROS 大會展示了這款能自主翻轉的蟑螂機器人。
除了美國加州大學柏克萊分校以外,其他國家的科研實驗室也對仿生機器人抱有較高的研發熱情。據了解,俄羅斯的科學家們曾經在 2015 年宣布,他們歷經 7 個月花費 150 萬盧布(約台幣 79 萬元),研製出一款以南美蟑螂為原型的微型機器人「蟑螂特務」。


他們根據蟑螂運動的動力學原理,使用回形針、彈簧、鋰電池等數百個微型零件完成了初始模型的研製工作。此機器人模仿蟑螂的外形、習性和內部構造,讓機器人獲得蟑螂的生活能力和運動特性。它體長 10 公分,每秒可走 0.3 公尺。
研究人員還考慮如何增強這種機器人的偽裝性,使它不易被發現。目前,蟑螂機器人尚不能裝配相機,但是能夠攜帶重量 10 克的物體,比如裝配一個小型便攜式相機。研究人員表示,蟑螂機器人將應用於搜尋和偵察任務,還能尋找掩埋在地震廢墟中的災民。
也許在不遠的將來,太空探索、排除地雷、救援等場景會成為蟑螂機器人的用武之地。