


轉載從: Tech News 科技新報
你印象中的「機器手臂」能做什麼?

能把地上的球收撿起來。


能將小方塊疊起來。

還能轉筆。


但看上去似乎還不太流暢靈活。
為使機器人完成定位和抓取物體的工作,史丹佛大學研究人員設計一款機器手臂。不同於傳統機器手臂,「指尖」為鉸接式主動驅動滾輪,自由度(DoF)為 3,可對物體無限旋轉與抓握。論文入圍四大獎項,最終獲得最佳學生論文獎(Best Student Paper Award)和最佳機器人控制論文獎(Robot Manipulation)。


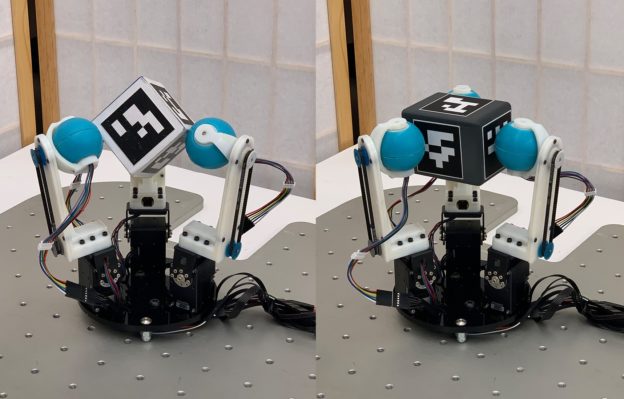
更令人高興的是,靈活機器手臂的升級版 V2 已問世──將 V1 指尖部分的圓柱形滾輪換成藍色小球,增加系統的穩定性。
從立體到平面的無限抓握與旋轉
先來看看 V1 表現如何。
輕輕鬆鬆旋轉有稜角的立方體,比如向大家展示骰子的 6 面。

再表演轉瓶蓋。

有時我們無法一下子拿起桌上的紙,看看機器手臂能否做到。

其中一根「手指」累了想休息,也可以輕鬆抓起籃球向不同方向移動。

那麼 V2 表現如何?
看上去就像輕鬆抓起小球的抓娃娃機爪子。


抓起來的小球可在手中 360 度旋轉,這靈活度真接近人手。

3 根「手指」,9 個關節
靈活裝置背後的原理又是什麼?
據了解,研究團隊透過設計自訂的硬編碼控制方案和模仿人類學習,成功推導出瞬時運動學方程,做到機器手靈活移動物體。

不難看出,史丹佛研究團隊的機器手臂有 3 根「手指」,每根「手指」的自由度都為 3,可理解為 3 個特定功能的關節:
- 重新定向物體的樞轉運動。
- 移動物體的連續捲動運動。
- 用手指抓取一定大小、形狀的物體。


▲ V1 基本構造。


▲ V2 基本構造。
那這裝置如何運轉?


研究人員開發自訂 API,將硬體資訊連線到控制演算法或用戶輸入。資訊主要包括各關節位置、Base Joint 的電流極限及馬達控制參數。
設計、組裝一台機器人需要不少套件,例如機器人大腦的控制器、五感的感測器等。製作機器人的關節,一般情況下都會用到電機,特點就是價格不高且易控制。
研究團隊選用南韓製造商 ROBOTIS 開發的高效能 Dynamixel 電機,電流用於設定 Base Joint 剛度及測量物體控制過程每根「手指」感受到的力。
為了更能控制電機,同時處理與進階 API 通訊,研究團隊還用到基於 USB 的微控制器 Teensy 3.6。
兩個版本主要差異在於「指尖」部分──V2 有球形滾筒,V1 的滾筒呈圓柱狀。這設計目的在於提升系統穩定性。升級後,滾筒不論如何定向,接觸點都能預測。此外 V2 樞軸範圍更大,為 180 度,V1 樞軸範圍僅 90 度。
外觀上,不論 V1 還是 V2,機器手並沒有沿襲以往擬人化設計思路,用 IEEE 的話說就是「扔出窗外」。不過比起之前的機器手臂設計,也並非完全標新立異。
此設計的創新點就在於「手指」無需經過複雜的重新定位過程,就可保證抓住物體之後還能旋轉物體。

論文合著者之一 Shenli Yuan 及團隊有關機器手臂 V1 的論文受到機器人領域峰會國際機器人與自動化會議(IEEE International Conference on Robotics and Automation,ICRA)關注。ICRA 2020 設有 12 個獎項,而 Shenli Yuan 團隊入圍 4 個獎,最終獲得最佳學生論文獎和最佳機器人控制論文獎。


擬人化機器手臂是值得研究的方向,但機器手臂要真正達到人手的靈巧程度,還有很長的路要走。我們提出這種設計,是想探索如果不受擬人化限制,機器手臂可有什麼獨特的能力,有沒有什麼工作人手做不到,而機器手卻可以做到。此外,就許多工作而言,嘗試模仿人手不一定是最優解。也許 20~50 年後,當機器手臂發展更好,看起來就不會那麼像人手了。
- Fetch Mobile Manipulator
- Design of a Roller-Based Dexterous Hand for Object Grasping and
Within-Hand Manipulation - Roller Grasper V2
- We Can Do Better Than Human-Like Hands for Robots
(本文由 雷鋒網 授權轉載;首圖來源:Shenli Yuan)